|
I am a Senior Researcher and Group Leader at the German Aerospace Center (DLR), where I lead the Interactive Skill Learning group. Prior to joining DLR I spent 5 years at IIT in Genova, Italy, where I got my PhD in 2017, and 2.5 years in Switzerland, at the Idiap Research Institute, as a postdoc. My research focuses primarily on efficient robot skill acquisition via imitation and reinforcement learning. I investigate compact skill representations which leverage prior knowledge in the form of object poses, geometries and uncertainties to achieve data-efficient learning and generalization. Email / Bio / Google Scholar / YouTube / Github |

|
|
|
|
|
[New]
M. Knauer, S. Bustamante, T. Eiband, A. Albu-Schäffer, F. Stulp, J. Silvério IEEE Robotics and Automation Letters (RA-L), 2026 |
|
[New]
E. Fiorini, M. Knauer, T. Eiband, M. Iskandar, J. Silvério IEEE Robotics and Automation Letters (RA-L), 2026 |
|
[New]
Y. Wang, S. Wu, C. Liu, C. Zhang, J. Silvério, Y. Huang IEEE International Conference on Robotics and Automation (ICRA), 2026 |
|
S. Schneyer, K. Nottensteiner, A. Albu-Schäffer, F. Stulp, J. Silvério IEEE Transactions on Robotics (T-RO), 2025 |
|
A. Padalkar, F. Stulp, G. Neumann, J. Silvério IEEE Robotics and Automation Letters (RA-L), 2025 |
|
M. Knauer, A. Albu-Schaeffer, F. Stulp, J. Silvério IEEE Robotics and Automation Letters (RA-L), 2025 |

|
A. Raffin, O. Sigaud, J. Kober, A. Albu-Schaeffer, J. Silvério, F. Stulp Reinforcement Learning Conference (RLC), 2024 Best Paper Award in Empirical Resourcefulness in RL |
|
A. Padalkar, G. Quere, A. Raffin, J. Silvério, F. Stulp Autonomous Robots (AuRo), 2024 |
|
M. Mühlbauer, T. Hulin, B. Weber, S. Calinon, F. Stulp, A. Albu-Schäffer, J. Silvério IEEE Robotics and Automation Letters (RA-L), 2024 |
|
G. Quere, F. Stulp, D. Filliat, J. Silvério IEEE International Conference on Robotics and Automation (ICRA), 2024 |
|
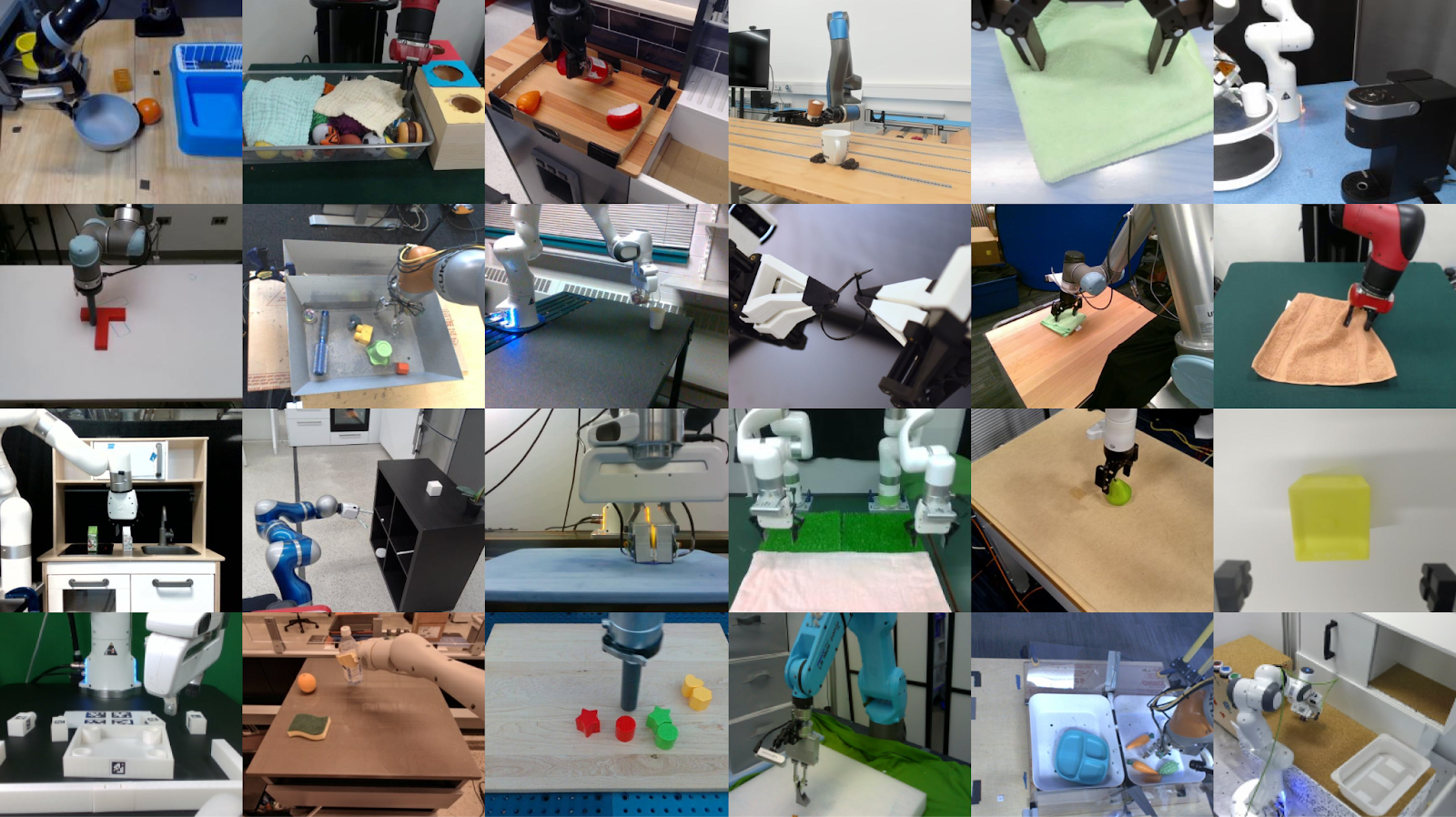
Open X-Embodiment Collaboration IEEE International Conference on Robotics and Automation (ICRA), 2024 https://robotics-transformer-x.github.io/ Best Conference Paper Award Best Paper Award in Robot Manipulation Finalist Best Student Paper Award Finalist |
|
G. Quere, F. Stulp, D. Filliat, J. Silvério 16th International Workshop on Human-friendly Robotics (HFR), 2023 Best Late-breaking Results Poster Award |
|
J. Silvério, Y. Huang IEEE International Conference on Robotics and Automation (ICRA), 2023 |
|
A. Padalkar, G. Quere, F. Steinmetz, A. Raffin, M. Nieuwenhuisen, J. Silvério, F. Stulp IEEE International Conference on Robotics and Automation (ICRA), 2023 |

|
X. Gao, J. Silvério, S. Calinon, M. Li, X. Xiao Complex & Intelligent Systems, 2021 |
|
F.J. Abu-Dakka, Y. Huang, J. Silvério, V. Kyrki Robotics and Autonomous Systems (RAS), 2021 |
|
J. Silvério, G. Clivaz, S. Calinon IEEE International Conference on Robotics and Automation (ICRA), 2021 |
|
S. Shetty, J. Silvério, S. Calinon IEEE Transactions on Robotics (T-RO), 2021 |

|
X. Gao, J. Silvério, E. Pignat, S. Calinon, M. Li, X. Xiao IEEE Robotics and Automation Letters (RA-L), 2021 |

|
E. Pignat, J. Silvério, S. Calinon International Journal of Robotics Research (IJRR), 2021 |
|
Y. Huang, F.J. Abu-Dakka, J. Silvério, D.G. Caldwell IEEE Transactions on Robotics (T-RO), 2020 |

|
T. Kulak, J. Silvério, S. Calinon Robotics: Science and Systems (R:SS), 2020 |
|
J. Silvério, Y. Huang, F.J. Abu-Dakka, L. Rozo, D.G. Caldwell IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019 |
|
Y. Huang, L. Rozo, J. Silvério, D.G. Caldwell International Journal of Robotics Research (IJRR), 2019 |
|
Y. Huang, F.J. Abu-Dakka,, J. Silvério, D.G. Caldwell IEEE International Conference on Robotics and Automation (ICRA), 2019 |

|
Y. Huang, L. Rozo, J. Silvério, D.G. Caldwell IEEE International Conference on Robotics and Automation (ICRA), 2019 |

|
J. Silvério, S. Calinon, L. Rozo, D.G. Caldwell IEEE Transactions on Robotics (T-RO), 2019 |
|
Y. Huang, J. Silvério, D.G. Caldwell IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 |

|
J. Silvério, Y. Huang, L. Rozo, D.G. Caldwell IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 |

|
J. Silvério, Y. Huang, L. Rozo, S. Calinon, D.G. Caldwell IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 |
|
Y. Huang, J. Silvério, L. Rozo, D.G. Caldwell IEEE International Conference on Robotics and Automation (ICRA), 2018 |

|
Y. Huang, J. Silvério, L. Rozo, D.G. Caldwell IEEE International Conference on Robotics and Automation (ICRA), 2018 |

|
J. Silvério, S. Calinon, L. Rozo, D.G. Caldwell IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2018 |

|
M. Zeestraten, I. Havoutis, J. Silvério, S. Calinon, D.G. Caldwell IEEE Robotics and Automation Letters (RA-L), 2017 |
|
L. Rozo, J. Silvério, S. Calinon, D.G. Caldwell Frontiers in Robotics and AI, 2016 |

|
J. Silvério, L. Rozo, S. Calinon, D.G. Caldwell IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015 |
|
Forked from https://jonbarron.info/. |